前言
最近接到一个需求,需要把一个物体在maya中的移动旋转发送到UE中,并且maya中的坐标轴需要能变化一次,UE中则保持原有坐标轴的位置。
位移
因为位移不基于坐标轴,所以直接把maya中在XYZ轴上的坐标值复制到UE中即可,但要注意Maya是Y轴向上的Ue是Z轴向上的,需要把Y轴数据和Z轴数据交换一下位置。
旋转
旋转是最难处理的部分,因为UE是Z轴向上的左手坐标系,Maya是Y轴向上的右手坐标系,一开始我想把Maya的数值直接复制到UE里面,然后交换Y和Z轴并且,翻转Z轴的数值,结果发现在0到90度之间,这个想法都是没有问题的,可一旦超过90°,就完全无法对应了。
xyz等于15°maya中的效果:
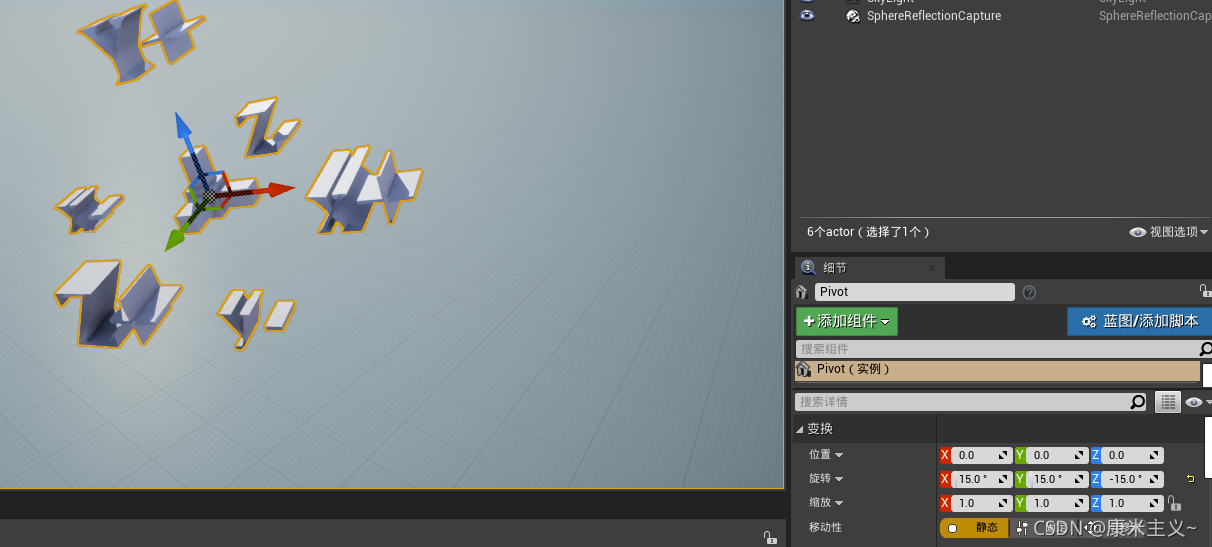
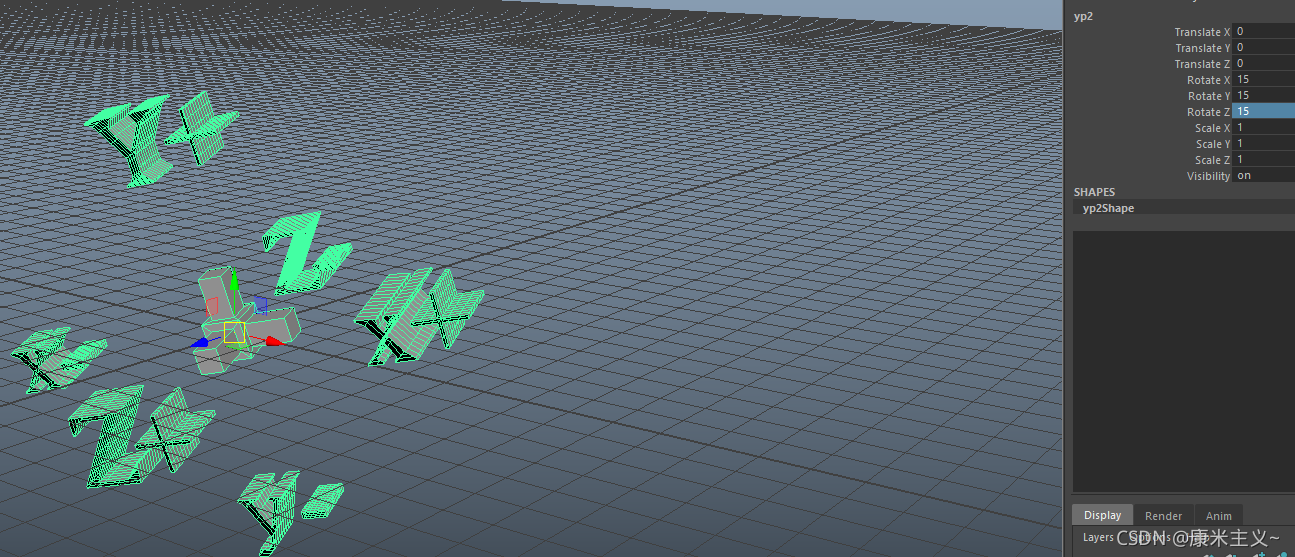 xyz等于15°UE中的效果:
xyz等于15°UE中的效果:
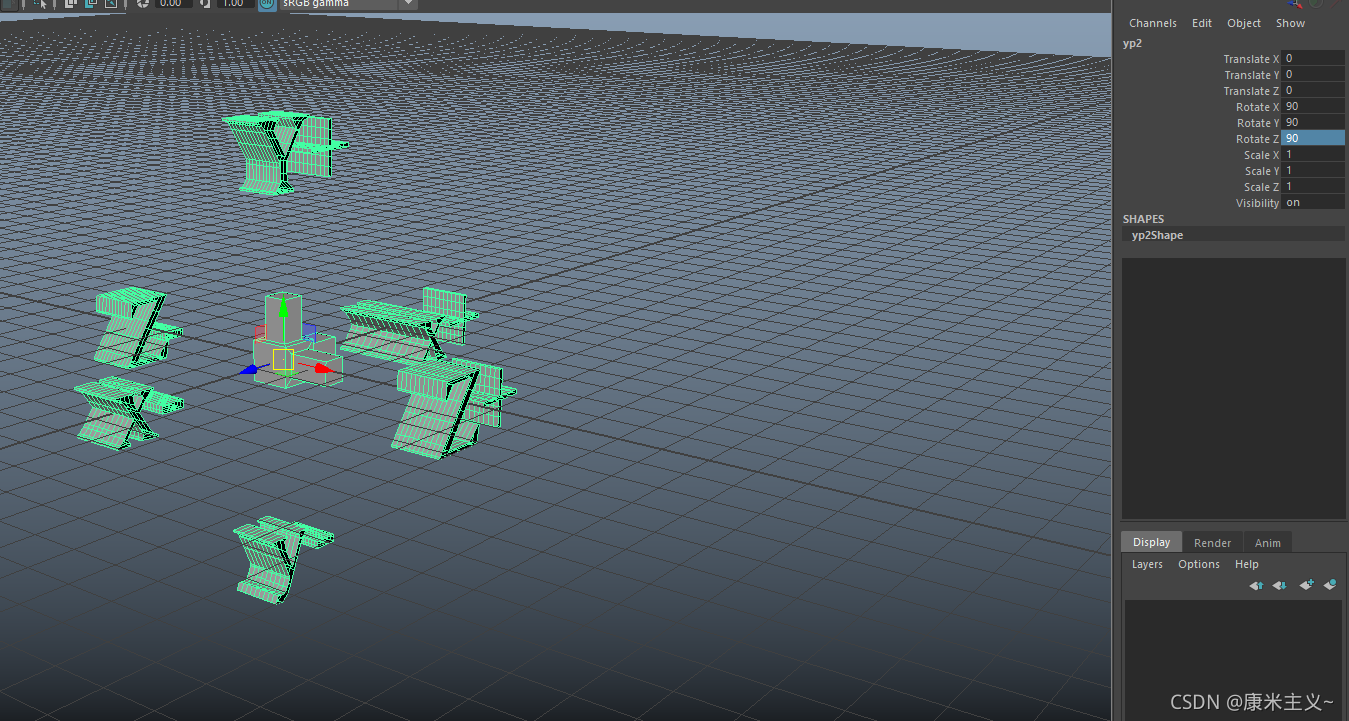
 xyz等于90°maya中的效果:
xyz等于90°maya中的效果:
 xyz等于90°UE中的效果:
xyz等于90°UE中的效果:
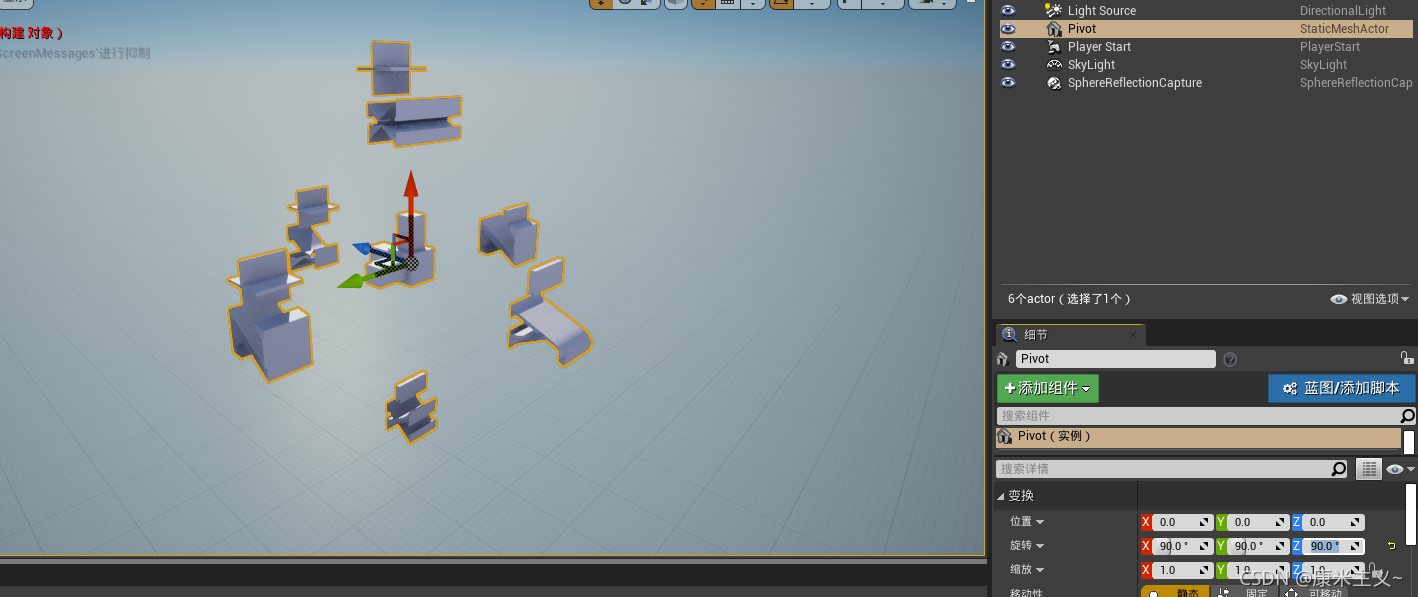
可以看到在xyz为90的时候maya和UE在相同镜头角度下呈现出完全不同的效果,而且无论以何种组合翻转轴向都无法得到正确的结果,试验之后发现在Maya,XYZ都是90度的情况下,UE中正确的旋转角度是0,0,-90,那么如何得到这个值?
旋转公式
首先想到的是Maya和UE的旋转角公式不同,所以同样的旋转要用不同的角度描述,用两个旋转公式按照各自的顺序旋转一个相同的向量,应该可以根据已知的角度,求出另一个角度,但查阅了有关文档,UE的旋转角公式和顺序几乎没有,只查到了连接而且作者似乎也不是很确定,而且这个方法似乎也有一些问题。
四元数
找了半天,终于发现了一个如何把Houdini的旋转转换到UE中的回答,他是先把Maya中的[[欧拉角]]旋转,转换成[[四元数]]旋转,然后翻转这个旋转中的W,并且交换Z和Y的值。正好在UE中提供了四元数和欧拉角转换的API
1
2
3
4
5
6
7
8
9
10
11
12
# NOTE Split Maya data
Rotate = TransfromData['Rotate']
rotationQuat = unreal.Quat()
# Convert to unreal Aixs
# Convert to Quat
rotationQuat.set_from_euler(unreal.Vector(Rotate[0],Rotate[1],Rotate[2]))
# SWAP Z and Y
temp = rotationQuat.z
rotationQuat.z = rotationQuat.y
rotationQuat.y = temp
# inverse W value
rotationQuat.w = -1 * rotationQuat.w
实验之后发现,只有在Z轴上的旋转是正确的,在XY上的旋转都无法对应,看来是Maya和Houdini的坐标系也有区别,不过试了几次之后发现,似乎XY上的旋转都是反的只要加一个负号就可以得到正确的结果了,于是改了改代码
1
2
3
4
5
6
7
8
9
10
11
12
# NOTE Split Maya data
Rotate = TransfromData['Rotate']
rotationQuat = unreal.Quat()
# Convert to unreal Aixs
# Convert to Quat
rotationQuat.set_from_euler(unreal.Vector(-Rotate[0],-Rotate[1],Rotate[2]))
# SWAP Z and Y
temp = rotationQuat.z
rotationQuat.z = rotationQuat.y
rotationQuat.y = temp
# inverse W value
rotationQuat.w = -1 * rotationQuat.w
这次测试过后发现终于完美实现了旋转信息的传递,接下来就是坐标轴变化的部分了
轴心点变换
因为旋转是基于坐标轴位置的,但无论在什么坐标轴下旋转,旋转后得到的物体的角度是相同的,也就是说,只要求出不同坐标轴在旋转之后所产生的的偏移,然后抵消掉这个偏移就可以了。
1
2
3
4
5
6
7
8
9
10
11
12
13
14
15
16
17
18
19
20
21
22
23
24
25
26
27
28
Pivot = TransfromData['Pivot']
# 排除本来偏移对坐标轴位置的影响
for i in range(0,len(Pivot)):
Pivot[i] = Pivot[i]-Translate[i]
# 把旋转角度转换为弧度制
XRadAngle = Rotate[0]/180.0*math.pi
YRadAngle = Rotate[1]/180.0*math.pi
ZRadAngle = Rotate[2]/180.0*math.pi
# 计算三角函数值
XCosa = math.cos(XRadAngle)
XSina = math.sin(XRadAngle)
YCosa = math.cos(YRadAngle)
YSina = math.sin(YRadAngle)
ZCosa = math.cos(ZRadAngle)
ZSina = math.sin(ZRadAngle)
# 这里写了一个矩阵的类,也可以用UE的类
pivotOver = Mat.Mat([[Pivot[0]],[Pivot[1]],[Pivot[2]]])
# 写出x,y,z的旋转矩阵
XAxiRotate = Mat.Mat([[1,0,0],[0,XCosa,-XSina],[0,XSina,XCosa]])
YAxiRotate = Mat.Mat([[YCosa,0,YSina],[0,1,0],[-YSina,0,YCosa]])
ZAxiRotate = Mat.Mat([[ZCosa,-ZSina,0],[ZSina,ZCosa,0],[0,0,1]])
# 按顺序应用旋转矩阵
PivotNew = ZAxiRotate * YAxiRotate * XAxiRotate * pivotOver
# 计算之前坐标轴和新坐标轴的偏移
Offset = pivotOver - PivotNew
#最后把这个偏移加上原有的位移即可
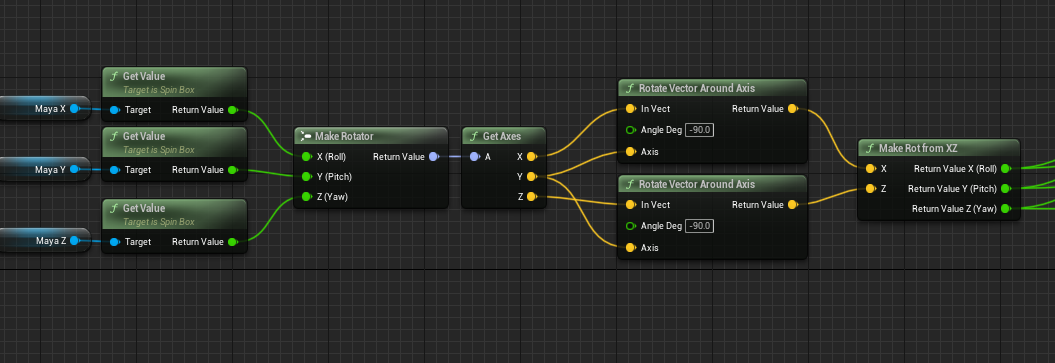
相机旋转
以上的方式在传递一般物体的旋转时是没有问题的,但是在处理相机时却会得到不正确的结果,反复实验之后发现maya相机朝向的是-z轴,而ue的相机朝向的是+x,所以在处理相机的旋转数据时,需要首先进行局部旋转,沿着y轴旋转-90度然后,将得到的数据再进行上述的转换即可. 这里用蓝图实现这个过程
谢谢观看!
参考
3D-app Euler-Rotations to UE4 Euler-Rotations
Houdini rotation to UE4 rotation?